






 分享
分享


品牌: |
IAI夹爪电缸IAI六轴焊接机器人 |
所在地: |
广东 深圳市 |
起订: |
≥1 件 |
供货总量: |
100 件 |
有效期至: |
长期有效 |
详情介绍
IAI夹爪电缸IAI六轴焊接机器人
IAI夹爪电缸IAI六轴焊接机器人
IAI夹爪电缸IAI六轴焊接机器人
IAI夹爪电缸IAI六轴焊接机器人
IAI夹爪电缸IAI六轴焊接机器人
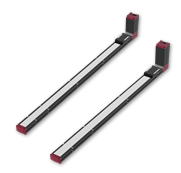
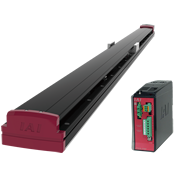
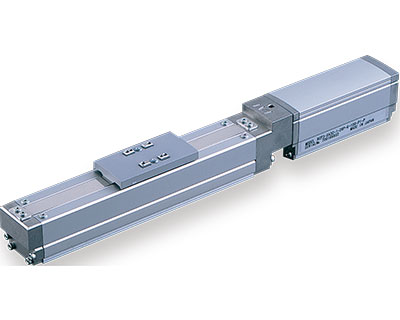
电机驱动
工业机器人的主流驱动方式。分为4大类电机:直流伺服电机、交流伺服电机、步进电机和直线电机。直流伺服电机和交流伺服电机采用闭环控制,用于高精度、高速度的机器人驱动;步进电机用于精度和速度要求不高的场合,采用开环控制;直线电机及其驱动控制系统在技术上已日趋成熟,已具有传统传动装置无法比拟的优越性能,例如适应非常高速和非常低速应用、高加速度,高精度,无空回、磨损小、结构简单、无需减速机和齿轮丝杠联轴器等。在并联机器人领域直线电机已经得到了广泛应用。

四轴SCARA机器人和六轴关节式机器人中,四轴机器人是特别为高速取放作业而设计的,而六轴机器人则提供了更高的生产运动灵活性。
四轴机器人
SCARA机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。
这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机器人擅长高速取放和其他材料处理任务。


相关评论 共0条